技术挑战

对生产力和定位精度不断提高的要求给驱动系统和伺服驱动带来了新的挑战。然而,机械振动和系统稳健性带来了限制。
Triamec 运动解决方案突破了以前的限制,通过为以下技术挑战提供出色的解决方案,为您的应用提供显着的性能优势:
具有低轴承阻尼和明显共振的高动态机制

控制系统的快速反应允许系统阻尼,此外,共振被积极抑制。
为了加快流程速度并提高精度,越来越多地使用直接驱动轴,消除齿隙或无齿隙。但是,有弹性的齿轮对加工精度和循环时间有非常积极的影响,而直驱则没有这个优势。因此,现在更难实现负载对电机的良好适应。此外,齿轮单元的滑动摩擦被消除,这有助于阻尼驱动。
带来的问题是,随着更大的超调,机械共振会产生,并且会很快破坏该过程。总而言之,伺服驱动器中的控制因此比以前要求更高。为了抵消这些缺点,先进的控制系统必须具有显着更高的带宽,以便主动抑制整个系统以及共振。具有 100kHz 控制的 Triamec 伺服驱动器完美地满足了这一要求,并取得了令人印象深刻的结果。
低背隙、高预紧滚珠轴承:高摩擦

只有控制系统的快速反应才能有效抑制静摩擦和滑动摩擦之间的冲击,并在行驶过程中实现最小的路径偏差。
一种更精确地引导精密轴的方法是提高滚珠轴承的预紧力。此类系统主要用于旋转非常缓慢的生产机器,速度远低于每分钟一转。除了位置之外,同步在这里起着特别重要的作用:驱动器必须始终准确地遵循设定的速度,即偏差最小。
轴承的高预紧力导致非常高的滑动摩擦甚至更高的静摩擦。由于旋转缓慢,轴始终处于静摩擦和滑动摩擦之间,这是一个非常不稳定的区域,因此难以控制。实验表明,快速控制,例如 Triamec 伺服驱动器,在同步操作方面带来了显着超过一个数量级的巨大改进。
毫秒范围内的快速处理
充分的采样对于良好的过程控制至关重要。
快速工艺(例如引线键合,每秒必须在硅芯片和封装连接之间绘制多达 30 条线)需要高采样频率:在复杂的空间路径中,20μm 厚的线仅在 15ms 内绘制。因此,必须以足够的扫描频率映射该轨迹,以使过程稳定和稳健。
Triamec 伺服驱动器采用 10kHz 周期的路径规划,可在 100μs 内重新编程。10kHz 设定数据在驱动器中内插到 100kHz 以进行位置控制
噪声抑制
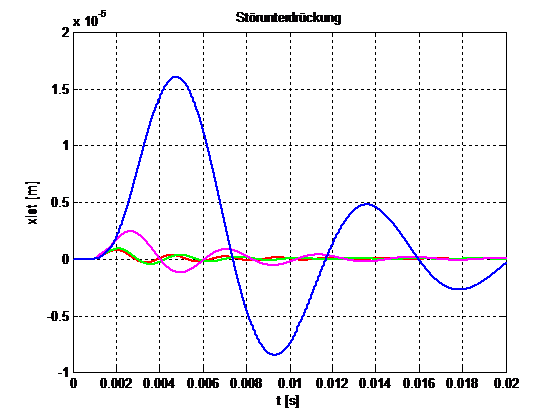
快速控制对偏差的反应更快,因此可以更好地抑制或补偿它们。
除了高阻尼和良好的控制行为外,良好的干扰抑制是每个控制系统的目标,同时追求最高的控制频率。由此,可实现更高稳健性、更好表面加工、更好工艺质量的应用。
凭借 100kHz 的电流控制和位置/速度控制,Triamec 在该领域树立了标准。