路径规划 - 目标数据生成
- 真正的jerk限制
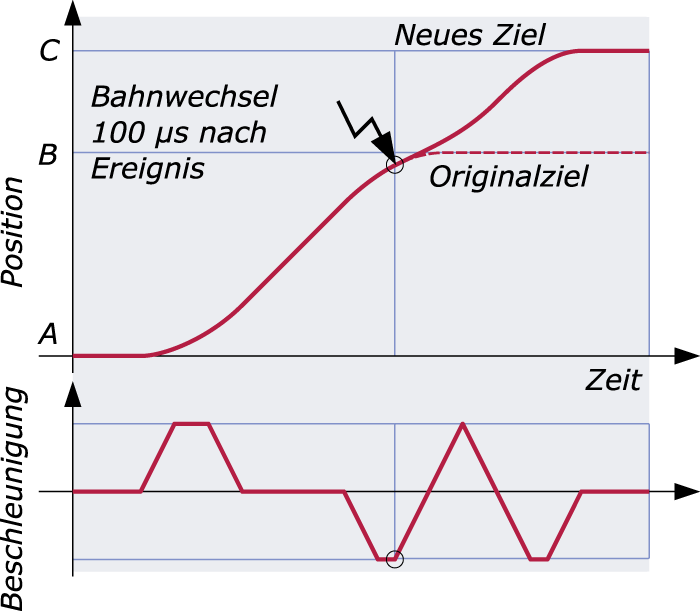
- 可在 100μs 内重新编程
Triamec 伺服驱动器具有用于点对点应用的本地路径规划。多个伺服轴的协调运动由上级单元控制:
本地路径规划
伺服驱动器中的路径规划以 10kHz 周期生成目标数据,真正限制了加加速度并具有所有常用参数。“真正的加加速度限制”意味着使用恒定的、可定义的加加速度值,而不仅仅是加加速度时间。真正的 jerk 限制需要更多的计算工作,但使用起来更容易、更直观,并且在物理上更有意义。
得益于新颖的算法,可以在 100μs 内计算和实施路径变化。这使得复杂的应用程序可以在毫秒和微米范围内进行传感器控制:
- 事件控制路径规划、传感器引导路径
- 触地检测并移动到相对目标
- 后期路径校正,例如视觉引导系统(芯片键合)
外部路径规划/目标数据
通过Tria-Link或其他接口,外部 CNC 标称数据,例如在中央计算机上计算的 CNC 目标数据,可以传输到伺服驱动器。这些最好由伺服驱动器接收为 P、V、A 三元组(位置、速度和加速度),并为内部位置控制进行物理正确插值。
目标数据必须以固定周期发送到伺服驱动器。为此,通常在主机上使用实时系统,例如Beckhoff 的 TwinCAT。
对于预先计算的路径,例如用于 CNC 应用或光学的路径,Triamec Motion System 消除了对实时环境的需求。Triamec Tria-Link适配卡具有实时表,减轻了应用程序的实时性要求,具有经济优势并大大简化了编程。